尾波(英语:wake)是固体在划过流体(特别是液体)表面时在尾部产生的V形传播的波,例如水鸟或船舶匀速游过水体时在水面激起的后方波纹。因为由英国的开尔文男爵——物理学家威廉·汤姆森(William Thomson,1824~1907)最先对船波进行数学研究,因此也称为开尔文船波(Kelvin wake或Kelvin ship wave)。
数学原理
船形物体的尾波形状和福禄数 有密切关系。
其中g为重力常数,V是船速,l是船的长度。
令船的长度
则 .
对于长度大而速度低的轮船,Fr数小,开尔文船波主要是长波,其波前与速度矢量的夹角比较小。
而小快艇,长度小,速度高,Fr 数大,开尔文船波则以短波长的水波为主,而波前则与速度矢量成较大的夹角。[1]
开尔文船波动研究,对于船舶的设计有重要意义,因为船舶的马力,有一部分消耗在激起船波。利用Fr数与速度成正比,与长度的平方根成反比的规律,可以利用小的模型,缩小船长 倍,同时缩小速度M倍,可以在实验室中模拟海上舟。[2]
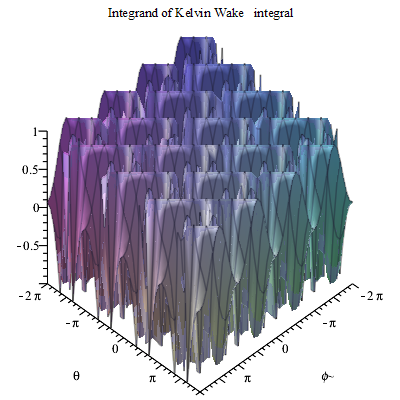
多鞍点函数积分
Integrand of Kelvin Wake Integral
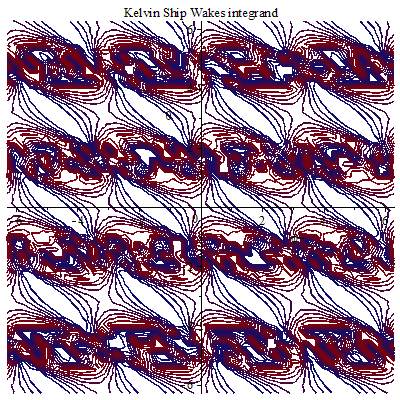
Kelvin Ship Wake Integrand contour Maple plot
当船只以速度V驶过深水湖面,波形的幅度在相对于船只为静止的极坐标( 中在船只的速度矢量方向, ),由下列公式表示[3]
其中
是福禄数的平方
为重力常数 为船的长度。
上列K函数是下列多鞍点积分的正数部分:
其中,多鞍点积分的核函数为
此核函数是一个多鞍点函数,振荡剧烈如图
求其极点,
解之,得
由此
度,
度
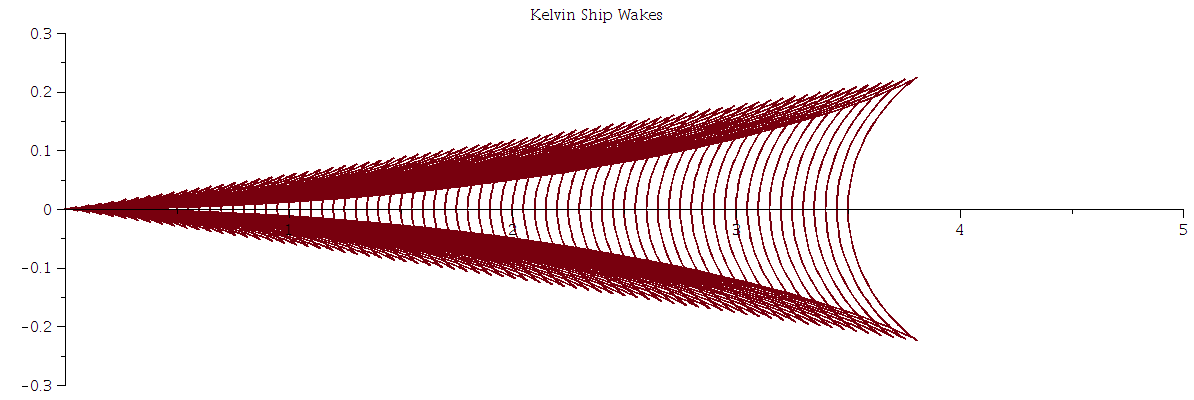
这就是凯尔文船波的V型波包线的夹角,最早由凯尔文男爵发现,而且角度与船速无关.[4][5]至于波纹本身则与船速矢量的夹角为
°[1]
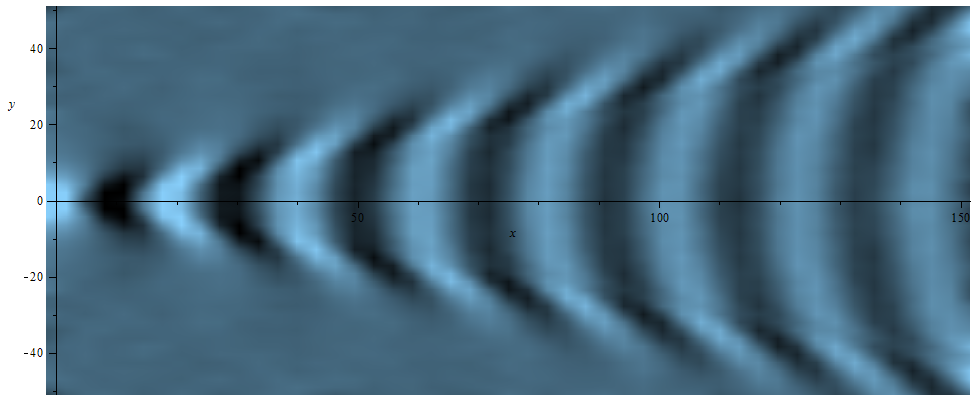
开尔文驻相法
Kelvin Wake (Maple density plot)
开尔文船波积分 必须通过数值积分计算。开尔文男爵根据被积分函数在积分区间内剧烈震荡的特点,提出了驻相法(Method of Stationary Phase)。
原理:当被积分函数剧烈震荡时,除了在极点外,震荡的被积分函数正负相抵消,因此可以将此被积分函数在极点的值作为整个积分的近似,驻相法乃是拉普拉斯方法的推广。[6]
被积分函数
的两个极点是:
令
开尔文船波的波峰,由下列两个参数方程式描述[7]
外部链接
脚注
参考文献
- Frank J. Oliver, NIST Handbook of Mathematical Functions, 2010, Cambridge University Press
- Jame Lighthill Waves in Fluids, Cambridge University Press 1979


{kind=link}
{kind=link}
{kind=link}
{kind=link}