六维空间
六维空间 是指任何拥有六个维度的空间,六自由度,并且需要六个数据或坐标来指定该空间中的位置。这些座标可以有无限多种 但最有趣的是更简单的模型的一些方面的环境。 其中最有趣的是六维欧几里得空间, 在其之中可构造出六维多胞形以及五维球面。 六维有限空间 以及 双曲空间同时也被研究,具有恒定的正和负曲率。
以狭义来说,六维欧几里得空间,ℝ6,是通过将所有实六元数视为该空间的六个向量而生成的。因此,它具有所有欧氏空间的性质,因此它是线性的,具有度量和一组完整的向量操作。特别地,两个六维向量之间的点积容易定义,并且可以用于计算度量。 6 × 6的点积可以用于描述例如定点旋转变换的几何操作。
以广义来说的,任何可以用六个坐标描述的空间, 不一定必须要是欧几里得空间,但必须是六维的。其中一个例子就是六维球面的表面, S6。这是七维欧几里得空间中与原点等距的所有点的集合。 这个约束减少了描述六维球面上的所有的点所需的坐标数量,因此它具有六个维度。这种非欧几里得空间比欧几里德空间更为常见,在六个维度上它们具有更多的应用。
几何
六维多胞形
在六维空间中的多胞形都称为六维多胞形。 最常见的是正多胞形,而这些正多胞形在六维空间中只有三个: 六维单纯形,六维超方形,六维正轴形。而更广义的类型是六维均匀多胞形,是由反射的基本对称群构造出的,每一个域由考斯特群定义。 每一个均匀多胞形是由一个环形考斯特-丁肯图定义的。 六维半超方形是一个D6家族中的一个特殊多胞形,而221以及122则是属于E6家族。
| A6 | BC6 | D6 | E6 | ||
|---|---|---|---|---|---|
| 六维单纯形 |
六维超方形 |
六维正轴形 |
六维半超方形 |
221 |
122 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
五维球面
一个五维球面,或是一颗六维球体,是一个从五维曲面到中心点皆等距的超球体。它的符号为S5,而关于五维球面的方程式,设半径为r,其超球心为
而这个五维球面在六维空间的体积是
也就是5.16771 × r6,而一个六维超立方体中最大的内接六维超球大约等同于该六维超立方体的0.0807倍。
六维球面
六维球面,或是七维空间的超球体, 是一个从六维曲面到中心点皆等距的超球体。它的符号为S6,而关于六维球面的方程式,设半径为r,其超球心为
而这个六维球面在七维空间的体积是
也就是4.74277 × r7,而一个七维超立方体中最大的内接七维超球大约等同于该七维超立方体的0.0369倍。
应用
三维变换
在三维空间中,一个硬性变换有着六自由度, 三个沿着三个座标轴和三个旋转群的平移。 通常这些变换被单独处理,因为它们具有非常不同的几何结构, 而处理它们的方式为将它们视为单个六维对象。
螺杆理论
在螺杆理论中,角速度和线速度被结合成一个六维的单一物体,称为缠结。一个称为扭结的类似物体结合了六维空间中的力以及力矩。 这些可以被视为在改变参考系时线性变换的六维向量。变换以及旋转并不能以这样的方式操作,而是与幂的扭曲有关。
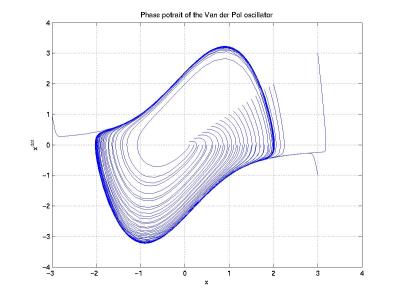
相空间
{kind=link}
相空间是由粒子的位置和动量构成的空间,其可以在相图中一起绘制以突出量之间的关系。在三维中移动的一般粒子具有六维的相位空间,绘图将会太多,但他们可以在数学上分析。[1]
四维空间中的旋转
在四维空间中的旋转组,SO(4),有着六自由度。 想像此旋转可透过考虑将4 × 4 的矩阵代表为一个旋转:作为一个正交矩阵的话,这个矩阵就被确定了。 直到符号的改变,例如主要对角线上方的六个元素。但这个群不是线向的,并且比其他的构造复杂了许多。
另一种观察这个群的方式是用四元数乘法表,每一个四维空间中的旋转可以通过乘以一对单位的四元数来实现,一个在向量之前而一个在后。这些四元数是独特的,直到它们的符号改变,并且当以这种方式使用时产生所有旋转, 所以乘积的群,S3 × S3,是一个SO(4)的双重复叠 且必须要有六个维度。
即使我们所居住的空间被认为是三维的,仍然对于四维空间有着实际应用。四元数,其中一种方式是在三维空间中描述其旋转,由四维空间组成。四元数之间的旋转,例如用于内插,位于四维空间内。有着三个空间维度以及一个时间维度的时空也是四维的,即使和欧几里得空间有着不同的结构。
电磁学
在电磁学中,电磁场通常被认为是由两件事情组成 电场和磁场。 它们皆属于三维空间中的向量场,通过马克士威方程组而互相关联。第二种方法是将它们组合为单个物体,即六维电磁张量 一个张量或双重向量的值表示电磁场。 使用这个麦克斯韦方程可以从四个方程压缩成一个特别紧凑的单一方程:
其中F是电磁张量的双重向量形式,J是四维电流密度,而∂是一个合适的微分算子。[2]
弦理论
{kind=link}
在物理学中,弦理论的内容是尝试使用一个单一的数学模型来描述广义相对论以及量子力学。 虽然是一个试图模拟我们的宇宙,它发生在一个空间比我们熟悉的四个空间时间更多的维度。特别地,许多弦理论发生在十维空间中,加上一个额外的六维空间。 这些额外的维度是理论所需要的,但是因为它们不能被观察到被认为是相当不同,也许紧化以与特定的几何形状形成的六维空间太小而不能观察到。
自从1997年,其他弦理论学者开始针对于六维空间进行研究。 小型弦理论属于五维空间以及六维空间的非引力弦理论,是在考虑十维空间为弦理论的极限时出现的。[3]
理论背景
四维空间中的双重向量
许多上述应用可以通过考虑四维中的实数六维二重向量而在代数上彼此相关。 它们可以对于欧几里德空间中的二重向量集而被写成Λ2ℝ4,或是对于时空中的二重向量集而被写成Λ2ℝ3,1。普吕克座标是ℝ4中的二重向量,而前面讨论的电磁张量是ℝ3,1中的一个二重向量。 二重向量可以用于透过指数图生成ℝ4或是ℝ3,1 中的旋转(例如,应用Λ2ℝ4中所有二重向量的指数图生成ℝ4中的所有旋转)。 它们也可以透过齐次坐标而与三维空间中的普通变换相关,其可以被认为是ℝ4中的修改旋转。
双重向量由四个向量对之间的所有可能的外代数的和产生。因此,它们具有C4
2 =6个组件,并且可以最通用地写成
它们是第一个不能全部由向量对的乘积产生的二重向量。 它们可以是简单二重向量,而由他们所生成的旋转则是单旋转。 而其他在四维空间中的旋转则是双旋转,而等斜旋转]并且对应于不能由单个外代数产生的非简单二重向量。[4]
六维向量空间
六维向量空间是六维欧几里得空间的向量。 就像其他的向量如线性,可以像其他维度一样被减去和缩放。在高维度中向量的维度不是使用字母,更高的维度通常使用后缀来指定维度,所以一般的六维向量空间可以被记做 a = (a1, a2, a3, a4, a5, a6)。如这样表示时,六个基向量维 (1, 0, 0, 0, 0, 0), (0, 1, 0, 0, 0, 0), (0, 0, 1, 0, 0, 0), (0, 0, 0, 1, 0, 0), (0, 0, 0, 0, 1, 0) ,(0, 0, 0, 0, 0, 1).
在向量运算符中,向量积不能在六个维度中使用;而是两个六维向量的外代数导致具有15个维度的二重向量。 两个向量的数量积是
它可以用来找出两个向量之间的角度和范数,
这可以用于例如计算六维立方体的对角线;其中一个角在原点,边缘与轴线对齐,而边长为1,相对的角在(1, 1, 1, 1, 1, 1), 而范数是
这是6维立方体的对角线的矢量的长度。
吉布斯双重向量
在1901年,约西亚·威拉德·吉布斯发表了一个在包括六维向量空间上具有影响力的研究,他称为 "二重向量"。它由单个物体中的两个三维向量组成,他曾经用以描述三维中的有限空间。 它已经失去使用,因为其他技术已经发展,而名称"双重向量"现在与几何代数更紧密相关。[5]
参见
- 次元
参考文献
- ^ Arthur Besier. Perspectives of Modern Physics. McGraw-Hill. 1969.
- ^ Lounesto (2001), pp. 109–110
- ^ Aharony (2000)
- ^ Lounesto (2001), pp. 86-89
- ^ Josiah Willard Gibbs, Edwin Bidwell Wilson. Vector analysis: a text-book for the use of students of mathematics and physics. Yale University Press. 1901: 481ff.
外部链接
- Lounesto, Pertti. Clifford algebras and spinors. Cambridge: Cambridge University Press. 2001. ISBN 978-0-521-00551-7.
- Aharony, Ofer. A brief review of "little string theories". Quantum Grav. 2000, 17 (5). Bibcode:2000CQGra..17..929A. doi:10.1088/0264-9381/17/5/302.