稳定性理论
数学中的稳定性理论是指微分方程的解以及动态系统的轨迹在初始条件有小扰动时的稳定性。像热传导方程式就是稳定的偏微分方程,因为初始值的小扰动只会造成之后温度的小幅变化(这是偏微分方程中最大值定理的结果)。在偏微分方程中可以用Lp范数或是sup范数来量测二个函数之间的距离,而在微分几何中可以用Gromov–Hausdorff距离来量测二个空间之间的距离。
在动态系统中,轨道为李雅普诺夫稳定的条件是,在前进轨道上的任何一点,都会在够小的邻域中,或是会维持在小的邻域内(也许会比原来的距离要远一点)。为了判断轨道的稳定性或是不稳定性,已发展出许多不同的准则。在较理想的情形下,此问题可以简化成一个已有相当多研究,和矩阵特征值有关的问题。另一种更通用的方式会用到李亚普诺夫函数。在实务上,会用到许多的稳定性判据。
动态系统的简介
许多微分方程的质性理论以及动态系统的类似理论都在处理其解及轨迹的渐近性质-若经过足够长的时间,系统会怎么变化。最简单的行为是平衡点(也称为不动点)及周期点。若对特定的轨道已有相当的了解,很自然会问下一个问题:若初始条件有一些小变化,是否还会有相似的特性。稳定性理论就是要回答以下的问题:相邻的轨道是否会持续保持相邻?与一轨道相邻的轨道最终是否会收敛到该轨道(后者的性质比较强)。前者的轨道有“稳定”的特性,后者的轨道有“渐近稳定”特性,最后收敛到的轨道有“吸引”(attracting)特性。
一个一阶常微分方程的自治系统,其平衡解 的性质如下:
- 平衡解为稳定,若针对每个(小的) ,都存在 ,使得每一个解 都有满足和平衡解距离在 内的初始条件(也就是 ),在所有时间 内,其距离都维持在 内(也就是 )。
- 平衡解为渐近稳定,若此平衡解稳定,而且存在 ,使得只要 ,就可以得到 时, 的结果。
稳定性代表在小的扰动下,其轨迹不会有太大的变化。不过也有另一种情形,与一轨道相邻的轨道最终是否会远离该轨道,有时情形下这也是受关注的特性。一般而言,从初始状态往某一方向扰动,可能会趋近原来的轨道,往其他方向扰动,会远离原来的轨道。也有可能有往某特定方向扰动时,轨道的行为比较复杂,既不趋近原来的轨道,也不远离原来的轨道,此情形下,就无法用稳定性理论得到有关其动态的资讯。
稳定性理论中的一个基本概念是轨道在微扰下的质性特性可以用系统在轨道附近进行线性化来分析。在n维相空间的平滑动态系统的每个平衡点上,都存在n x n方块矩阵A其特征值决定其邻近点的行为(Hartman–Grobman定理)。更准确的说法,若所有的特征值都是负实数,或是实部为负的复数,其平衡点稳定,有吸引特性的不动点,邻近的点会以指数衰减的速率趋近平衡点,也就是李雅普诺夫稳定及指数稳定。若其特征值没有纯虚数或是零,则系统会会趋近平衡点或远离平衡点的扰动方向就和矩阵A的特征空间,以及其对应特征值的实数为正值或是负值有关。在一些更复杂的轨域中也有类似的扰动描述。
不动点的稳定性
最简单的轨道是不动点,也称为平衡点。若一力学系统在稳定平衡点下,轻推一下之后,系统最终会回到原来的位置,像摆的小振荡即为此例。若是有阻尼的系统,稳定状态会进一步形成渐进稳定。相反的,若是不稳定的平衡点,就像在山顶上的一个球,轻推一下可能就有大的位移,之后可能可以回到原始位置,也有可能无法收敛到原始位置。
有许多针对线性系统的稳定性测试方式,非线性系统的稳定性也可以透过其线性化系统的稳定性来判断。
映射
令f: R → R为光滑函数,存在一不动点a f(a) = a。考虑由函数f迭代产生的以下动态系统:
不动点a稳定,若f在a点导数的绝对值严格小于1,不动点不稳定若导数严格大于1。这是因为在点a附近,函数f可以用斜率f'(a)来进行线性近似:
意思是导数可以看出函数在迭代会趋近不动点a或是远离不动点,也可以看出迭代速率。若导数a恰为1或−1,还需要其他的资讯来判断稳定性。
在有不动点a的连续可微分映射f: Rn → Rn上,也有类似的判断准则,用a点的雅可比矩阵Ja(f)来表示。J的所有特征值绝对值都严格小于1,则a是稳定不动点,若至少有一个特征值绝对值严格大于1,则则a是不稳定。若n=1,最大绝对值为1,需要进一步分析,无法用雅可比矩阵测试来判断。在微分流形上的微分同胚也有类似的准则。
线性自治系统
一阶常系数线性微分方程不动点的稳定性可以用对应矩阵的特征值来分析。
考虑以下的自治系统
其中x(t) ∈ Rn,A为n×n的实数矩阵,有一个固定值的解
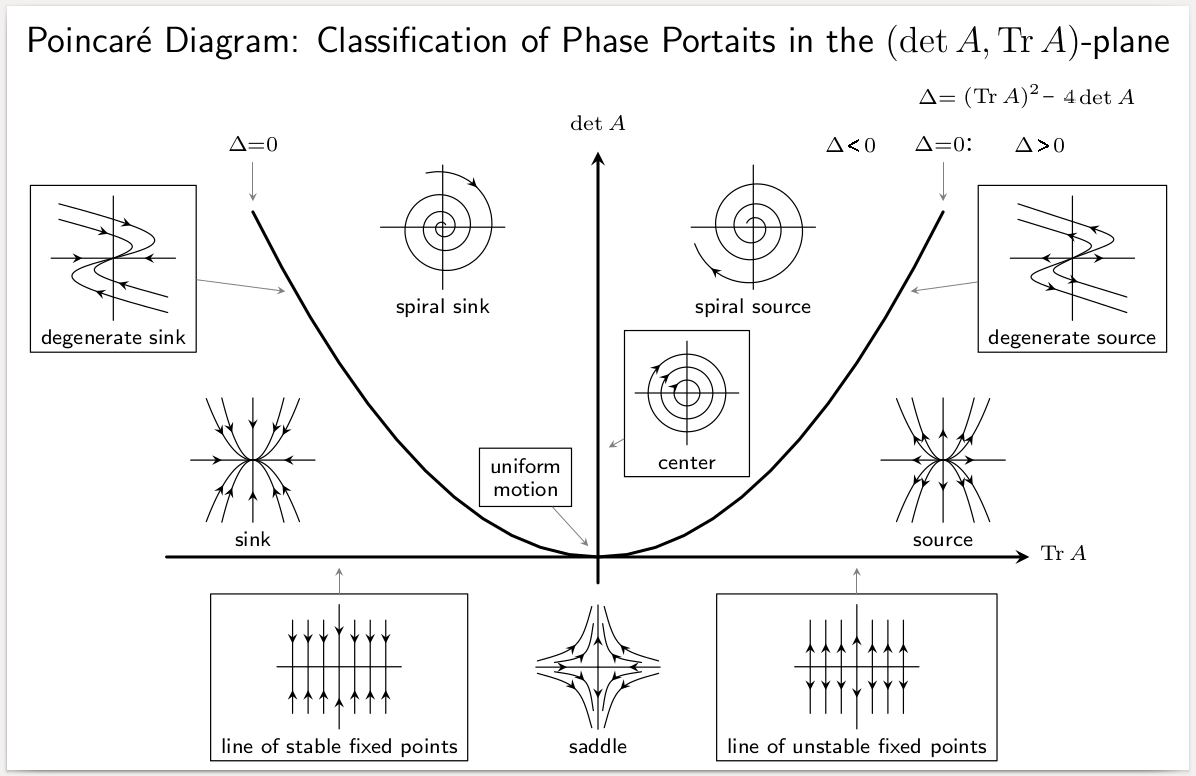
(换句话说,原点0 ∈ Rn是此动态系统的平衡点)。此解在t → ∞(未来)渐近稳定当且仅当矩阵A所有的特征值λ都满足实部小于零的条件 (Re(λ) < 0)。而此解在t → −∞(过去)渐近稳定当且仅当矩阵A所有的特征值λ都满足实部大于零的条件(Re(λ) > 0)。若有任何一个特征值的实部大于零(Re(λ) > 0),此解在t → ∞(未来)会发散。
为了判断线性系统在原点的稳定性,此结果在实务上的应用会透过劳斯–赫尔维茨稳定性判据实现。矩阵的特征值是其特征多项式的根。单变数,实系数的多项式若其根的所有实部都为负,称为赫尔维茨多项式。劳斯–赫尔维茨定理指出了赫尔维茨多项式的特点,可以在不实际找到所有根的情形下进行判断。
非线性的自治系统
非线性系统不动点的渐近稳定性可以透过Hartman–Grobman定理来判断。
假设v是Rn中的C1-向量场,在点p会为0(v(p) = 0)。则对应的自治系统状态m
有一个定值的解
令Jp(v)为向量场v在点p处的n×n雅可比矩阵。若J的所有特征值实值都是非零的负数,则其解在该点附近是渐近稳定。可以用劳斯–赫尔维茨稳定性判据来测试此一条件。
通用动态系统的李亚普诺夫函数
要确认动态方程的李亚普诺夫稳定性或是渐近稳定性,有另一种更通用的方式,是透过李亚普诺夫函数。
相关条目
参考资料
- Philip Holmes and Eric T. Shea-Brown (编). {Stability. Scholarpedia.
外部链接
- Stable Equilibria (页面存档备份,存于互联网档案馆) by Michael Schreiber, Wolfram 演示项目