分裂四元数
| 此条目目前正依照en:Split-quaternion上的内容进行翻译。 (2019年6月3日) |
| × | 1 | i | j | k |
|---|---|---|---|---|
| 1 | 1 | i | j | k |
| i | i | -1 | k | −j |
| j | j | −k | 1 | i |
| k | k | j | i | 1 |
在抽象代数中,分裂四元数(split-quaternions)或反四元数(coquaternions)是一种四维的结合代数的元素,由James Cockle在1849年引入,当时称为反四元数。 类似于汉密尔顿1843年引入的四元数 ,它们组成了一个四维的实向量空间,且有乘法运算。 与四元数不同,分裂四元数包含非平凡的零因子、幂零元和幂等元。(例如, 是幂等的零因子,而 是幂零元。)作为一种数学结构,分裂四元数形成了域代数,且与2 × 2的实矩阵同构。


集合 组成一个基。 这些元素的积由

- ,
- ,
- ,
- ,
- ,






给出。因此。 由以上定义可得,集合在分裂四元数乘法的定义下是一个群,与二面体群同构,称为正方形的对称群。



分裂四元数的共轭。


由于其基向量的反交换性,分裂四元数与其共轭的积由其迷向二次型

给出。
给定两个反四元数和,有,意味着 是可合成的二次型。 其上的代数是一种合成代数, 是其范数。 任何满足,的反四元数q称为零向量(Null vector而非Zero vector),它的存在意味着反四元数形成"分裂的合成代数",因此反四元数也被称为分裂四元数。






当范数非零时,有倒数,即 . 集合


是单位元的集合。 全体分裂四元数的集合组成环 ,其单位群为。全体的分裂四元数组成一个非紧致的拓扑群 ,且与同构(见下)。






矩阵表示
令 ,考虑普通复数 , ,它们的共轭复数为 , 。然后
将 表示为矩阵环,其中的分裂四元数的乘法与矩阵乘法的行为相同。例如,这个矩阵的行列式是
减号的出现将反四元数与使用了加号的四元数 区分开来。双曲几何中,庞加莱圆盘模型上范数为1的分裂四元数代表多重引导的使用是代数最重要的运用之一。
除了复矩阵表示,另一种线性表示将反四元数与2×2实矩阵联系起来。这种同构可以明确如下:首先注意到积
左边每个因子的平方是单位矩阵,而右边的平方是单位矩阵的负数。此外,注意这三个矩阵,连同单位矩阵,构成了 的基。可以使上述矩阵乘积对应于反四元数环中的 。然后,对于任意矩阵有一个双射
这实际上形成了环同构。此外,计算各项的平方和表明 ,矩阵的行列式。因此,反四元数的单位拟球与 群同构,因此与 也群同构,后者可以从上面的复表示中得到。
例如,用2×2实矩阵表示双曲运动群,见Karzel和Kist。[1]
在这两种线性表示中,范数由行列式给出。由于行列式是乘法映射,两个反四元数积的范数等于范数的积。这样反四元数就形成了合成代数。作为实数域上的代数,它是仅有的七个这样的代数之一。
由双曲复数生成
Kevin McCrimon展示了如何按照L. E. Dickson和Adrian Albert为 、 和 给出的除法构造所有的合成代数。[2]实际上,他给出了real-split的doubled product的乘法法则
如前所述,双共轭 因此
如果a和b是双曲复数,分裂四元数 那么
- .
性质
{kind=link}
{kind=link}
可以通过 的子空间 来了解其子代数。
令
参数 和 是此子空间中圆柱坐标系的基。参数 表示方位角。接下来令a表示任意实数,并考虑反四元数
这正是Alexander Macfarlane和Carmody的等边双曲面坐标。[3]
接下来,在环的向量子空间中构造三个基础集合:
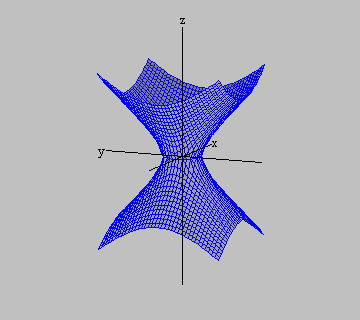
- , 单叶双曲面
- , 双叶双曲面
现在很容易验证
及
这些集合相等意味着当 时,平面
是 的一个与双曲复数平面同构的子环,就像对 中的任意 ,
是与普通复平面 同构的 的平面子环。
注意对于所有 , ,因此 和 是幂零元。平面 是 的一个与二元数同构的子环。由于每个反四元数都必须位于某个 、 或 平面上,所以这些平面组成了 ,例如,单位拟球
包含了 的构成平面上的“单位圆”:在 中是一个单位双曲线,在 中是一对平行线,而在 中确实是一个圆。
泛正交性
反四元数 的标量部分为w。
定义 对于非零反四元数 和 , 当且仅当乘积 的标量部分为零。
- 对任意的 ,如果 ,那么 意味着从 到 和 的射线是垂直的。
- 对任意的 ,如果 ,那么 意味着这两点是双曲正交的。
- 对任意的 , , 和 满足 。
- 如果 是反四元数环中的一个单位元,那么 意味着 。
证明:因向量外积的反交换性, ,因此 。
Counter-sphere geometry
The quadratic form qq∗ is positive definite on the planes Cv and N. Consider the counter-sphere {q: qq∗ = −1}.
Take m = x + yi + zr where r = j cos(θ) + k sin(θ). Fix θ and suppose
- mm∗ = −1 = x2 + y2 − z2.
Since points on the counter-sphere must line on the conjugate of the unit hyperbola in some plane Dp ⊂ P, m can be written, for some p ∈ J
- .
Let φ be the angle between the hyperbolas from r to p and m. This angle can be viewed, in the plane tangent to the counter-sphere at r, by projection:
- . Then
as in the expression of angle of parallelism in the hyperbolic plane H2 . The parameter θ determining the meridian varies over the S1. Thus the counter-sphere appears as the manifold S1 × H2.
Application to kinematics
By using the foundations given above, one can show that the mapping
is an ordinary or hyperbolic rotation according as
- .
The collection of these mappings bears some relation to the Lorentz group since it is also composed of ordinary and hyperbolic rotations. Among the peculiarities of this approach to relativistic kinematic is the anisotropic profile, say as compared to hyperbolic quaternions.
Reluctance to use coquaternions for kinematic models may stem from the (2, 2) signature when spacetime is presumed to have signature (1, 3) or (3, 1). Nevertheless, a transparently relativistic kinematics appears when a point of the counter-sphere is used to represent an inertial frame of reference. Indeed, if tt∗ = −1, then there is a p = i sinh(a) + r cosh(a) ∈ J such that t ∈ Dp, and a b ∈ R such that t = p exp(bp). Then if u = exp(bp), v = i cosh(a) + r sinh(a), and s = ir, the set {t, u, v, s} is a pan-orthogonal basis stemming from t, and the orthogonalities persist through applications of the ordinary or hyperbolic rotations.
Historical notes
The coquaternions were initially introduced (under that name)[4] in 1849 by James Cockle in the London–Edinburgh–Dublin Philosophical Magazine. The introductory papers by Cockle were recalled in the 1904 Bibliography[5] of the Quaternion Society. Alexander Macfarlane called the structure of coquaternion vectors an exspherical system when he was speaking at the International Congress of Mathematicians in Paris in 1900.[6]
The unit sphere was considered in 1910 by Hans Beck.[7] For example, the dihedral group appears on page 419. The coquaternion structure has also been mentioned briefly in the Annals of Mathematics.[8][9]
Synonyms
- Para-quaternions (Ivanov and Zamkovoy 2005, Mohaupt 2006) Manifolds with para-quaternionic structures are studied in differential geometry and string theory. In the para-quaternionic literature k is replaced with −k.
- Exspherical system (Macfarlane 1900)
- Split-quaternions (Rosenfeld 1988)[10]
- Antiquaternions (Rosenfeld 1988)
- Pseudoquaternions (Yaglom 1968[11] Rosenfeld 1988)
参见
- Split-biquaternions
- Split-octonions
- Hypercomplex numbers
参考资料
- ^ Karzel, Helmut & Günter Kist (1985) "Kinematic Algebras and their Geometries", in Rings and Geometry, R. Kaya, P. Plaumann, and K. Strambach editors, pp. 437–509, esp 449,50, D. Reidel
- ^ Kevin McCrimmon (2004) A Taste of Jordan Algebras, page 64, Universitext, Springer ISBN 0-387-95447-3 MR[1]
- ^ Carmody, Kevin (1997) "Circular and hyperbolic quaternions, octonions, sedionions", Applied Mathematics and Computation 84(1):27–47, esp. 38
- ^ James Cockle (1849), On Systems of Algebra involving more than one Imaginary (页面存档备份,存于互联网档案馆), Philosophical Magazine (series 3) 35: 434,5, link from Biodiversity Heritage Library
- ^ A. Macfarlane (1904) Bibliography of Quaternions and Allied Systems of Mathematics, from Cornell University Historical Math Monographs, entries for James Cockle, pp. 17–18
- ^ Alexander Macfarlane (1900) Application of space analysis to curvilinear coordinates (页面存档备份,存于互联网档案馆), Proceedings of the International Congress of Mathematicians, Paris, page 306, from International Mathematical Union
- ^ Hans Beck (1910) Ein Seitenstück zur Mobius'schen Geometrie der Kreisverwandschaften (页面存档备份,存于互联网档案馆), Transactions of the American Mathematical Society 11
- ^ A. A. Albert (1942), "Quadratic Forms permitting Composition", Annals of Mathematics 43:161 to 77
- ^ Valentine Bargmann (1947), "Irreducible unitary representations of the Lorentz Group", Annals of Mathematics 48: 568–640
- ^ Rosenfeld, B.A. (1988) A History of Non-Euclidean Geometry, page 389, Springer-Verlag ISBN 0-387-96458-4
- ^ Isaak Yaglom (1968) Complex Numbers in Geometry, page 24, Academic Press
延伸阅读
- Brody, Dorje C., and Eva-Maria Graefe. "On complexified mechanics and coquaternions." Journal of Physics A: Mathematical and Theoretical 44.7 (2011): 072001. doi:10.1088/1751-8113/44/7/072001
- Ivanov, Stefan; Zamkovoy, Simeon (2005), "Parahermitian and paraquaternionic manifolds", Differential Geometry and its Applications 23, pp. 205–234, arXiv:math.DG/0310415, MR2158044.
- Mohaupt, Thomas (2006), "New developments in special geometry", arXiv:hep-th/0602171.
- Özdemir, M. (2009) "The roots of a split quaternion", Applied Mathematics Letters 22:258–63. [2]
- Özdemir, M. & A.A. Ergin (2006) "Rotations with timelike quaternions in Minkowski 3-space", Journal of Geometry and Physics 56: 322–36.[3]
- Pogoruy, Anatoliy & Ramon M Rodrigues-Dagnino (2008) Some algebraic and analytical properties of coquaternion algebra[永久失效链接], Advances in Applied Clifford Algebras.